Also available as PDF.
What is PX4? At its most abstract, PX4 Autopilot is an open-source multi-architecture tool for developing drone flight management firmware.
Discovery
ST’s STM32 H747I Discovery is an evaluation board based on the STM32H747xI dual-core embedded system-on-chip. The H747 series sandwiches an ARM Cortex M7 and M4 with a plethora of on-chip peripherals. NuttX carries support for this board ‘out of the box’ although it does not utilise the standard ST-manufacturer’s hardware abstraction layer (HAL) but instead deploys its own NuttX µHAL.
Setting it up has a few “gotcha” moments, however. The following sections describe tips, tricks and other useful lessons learnt while developing a basic BSP for the H7; this is just a smaller subset of the entire corpus of tricks but serves as the highlights.
ARM Toolchain Series
The PX4 Autopilot firmware is a CMake project with specific toolchain version requirements. Successful and noiseless builds require an older version of Kitware’s CMake, version \(3.16.2\). Later versions trigger a policy warning about Python package macros. The ARM compiler toolchain similarly fires warnings and errors with the latest versions1. The firmware utilises 9-series2 ARM compiler version \(9.3.1\) for canonical compilation.
Later versions of the toolchain separate standard library headers for example; hence the compiler does not supply the standard math.h header. Smoother for development if the build picks up a more compatible version of the compiler toolchain until the project progresses to allow for the use of more up-to-date toolchain versions without breakages.
Board Support Package (BSP)
A minimal BSP lays out within the project as follows.
boards/stm32/h747i-disco/
├── default.px4board
├── nuttx-config
│ ├── include
│ ├── nsh
│ │ └── defconfig
│ └── src
└── src
└── CMakeLists.txtFiles with extension px4board define the board. The build system searches for these in order to find all available boards to configure and build.
At a minimum, before configuring the board, the default NuttX configuration needs to know the architecture and the location of the custom-board directory.
CONFIG_ARCH="arm"
CONFIG_ARCH_BOARD_CUSTOM=y
CONFIG_ARCH_BOARD_CUSTOM_DIR="../../../../boards/stm32/h747i-disco/nuttx-config"
CONFIG_ARCH_BOARD_CUSTOM_DIR_RELPATH=yRunning the text-based menu configuration tool now works. The build system fails without the ARM architecture configuration. Circular requirements exist: configuration depends on the architecture; the build tooling for configuration needs to know the architecture before configuration. The developer must first ‘bootstrap’ the build with at least the general architecture, ARM architecture in this case. The following make commands succeed by launching menu-driven configuration tools.
make stm32_h747i-disco menuconfig
make stm32_h747i-disco boardconfigTarget menuconfig launches the NuttX configurator while boardconfig launches the PX4 board configurator. See Figure 1 and Figure 2.
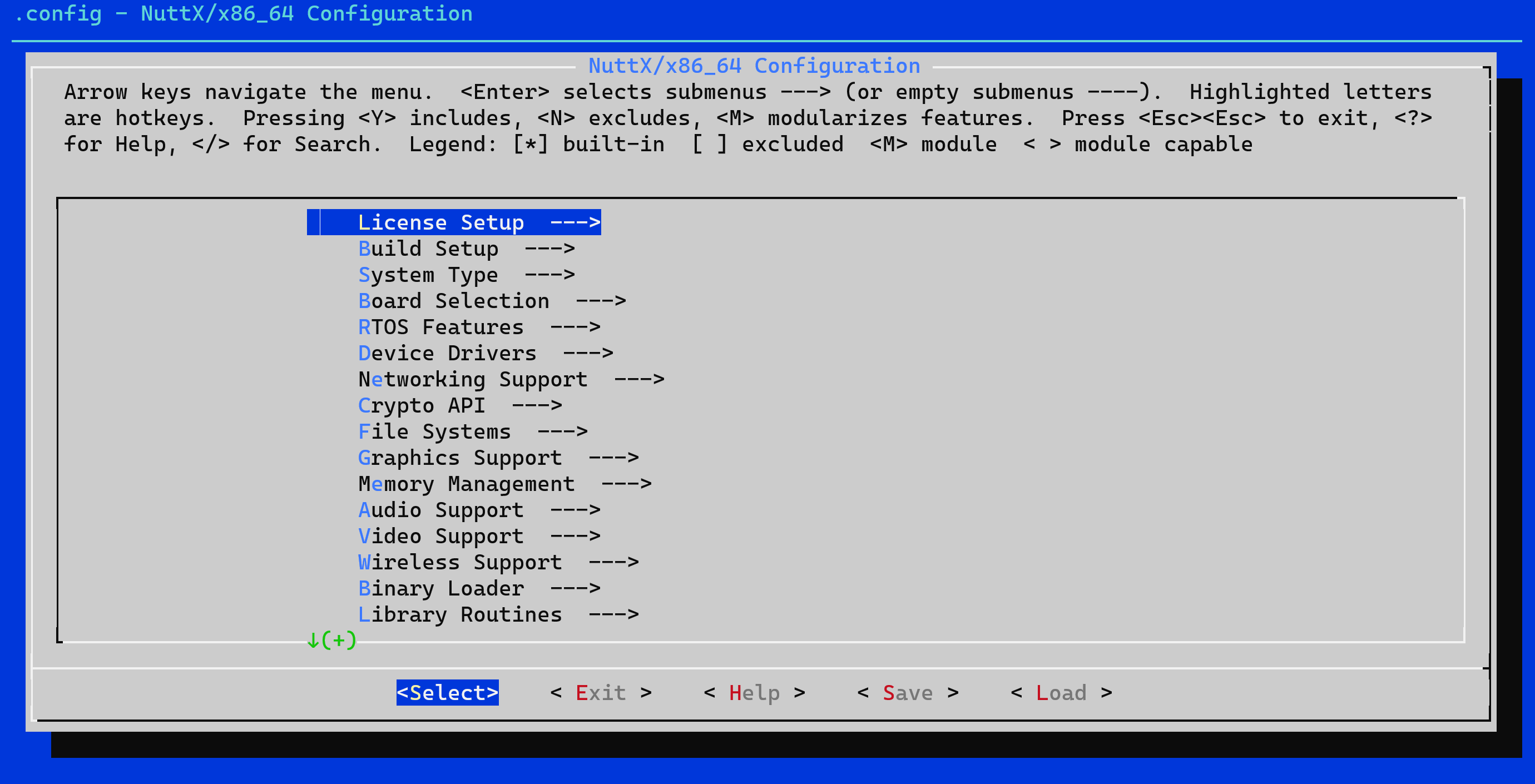
Figure 1: NuttX configuration menu

Figure 2: PX4 board configuration
Version Tag
The build system needs to see Git tags of the form \(v_{major.minor.patch}-dev\) otherwise it fails. Pull the remote tags if not already pulled.
Board Header
Builds always fail with various errors without three essential board_config.h header includes:
#include <stm32.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/board_common.h>All sorts of issues arise without including the PX4 configuration and the common board header—too many to describe in any detail—suffice it to say that these included headers act as bridges between the various PX4 sub-layers. Without them appearing in the board configuration, various PX4 platform-oriented components and µHAL dependencies collide with sundry unresolved enumerations, defines and function prototypes. The board configuration header glues the disparate layer of software together.
Board-Level Drivers
Linking the firmware fails without two important libraries:
ld: cannot find -lromfs
ld: cannot find -ldrivers_boardNuttX needs configuring with ROMFS filesystem support in order to resolve the romfs dependency.
“Drivers board” library refers to drivers for the board customisation. The sources already exist but within the NuttX ‘platform boards’ not within the PX4 upper layer. They belong to the PX4 NuttX repository at GitHub. The build system does not automatically find these sources and set them up for compiling and linking with the firmware. They need to be picked out and added to the drivers_board library.
These out-of-the-box board drivers compile with errors, however. The compiler complains about the comparison of integer expressions of different signedness: ‘int’ and ‘unsigned int’3.
for (i = 0; i < ARRAYSIZE(g_ledmap); i++)This needs correcting but the fix lives in a Git submodule as part of the NuttX repository. The proper fix would require a successful pull request applied to that repository. Tempting to create one. As an interim workaround, the custom drivers can copy and patch the offending sources.
Serial Ports
Compiling fails without at least one UART equipped at the NuttX layer. Just configure one using the NuttX configuration tool.
CONFIG_STM32H7_USART1=yNuttX equips serial-driver support by default but it does not enable any UART devices. The compiler sees an error.
Firmware Prototype
As a final version-stamping step, the PX4 build system converts the linked ELF to PX4 format using its custom px_mkfw tool. This step requires a firmware.prototype JSON file that describes the board assigning a board identifier together with other summary information.
{
"board_id": 999,
"magic": "PX4FWv0",
"description": "Firmware for STM32H747I Discovery",
"image": "",
"build_time": 0,
"summary": "STM32H747I-DISCO",
"version": "0.1",
"image_size": 0,
"image_maxsize": 2080768,
"git_identity": "",
"board_revision": 0
}General Tricks
Cleaning up the repo clone and its sub-modules to restart the firmware cleanly using git clean.
git clean -fdx
git submodule foreach --recursive git clean -fdxUpdate all the submodules using:
make submodulesupdateResults
The result is a minimal set of firmware for running PX4 autopilot on the H747I Discovery evaluation board by reusing the existing NuttX configuration and source files: ideal for evaluating a design without pre-loaded features standing in the way.
[373/375] Linking CXX executable stm32_h747i-disco_default.elf
Memory region Used Size Region Size %age Used
itcm: 0 GB 64 KB 0.00%
flash: 22452 B 2 MB 1.07%
dtcm1: 0 GB 64 KB 0.00%
dtcm2: 0 GB 64 KB 0.00%
sram: 2288 B 512 KB 0.44%
sram1: 0 GB 128 KB 0.00%
sram2: 0 GB 128 KB 0.00%
sram3: 0 GB 32 KB 0.00%
sram4: 0 GB 64 KB 0.00%
bbram: 0 GB 4 KB 0.00%It also flashes, runs and debugs. PX4 kindly sets up a launch configuration for VS Code. See Figure 3. Debugger connection on a Windows machine running Windows Subsystem for Linux uses usbipd for bridging USB to WSL. The vendor-product identifier 0483:374e corresponds to the evaluation board’s ST-Link in the ‘attach’ command snippet below.
usbipd wsl attach -i 0483:374e -d Ubuntu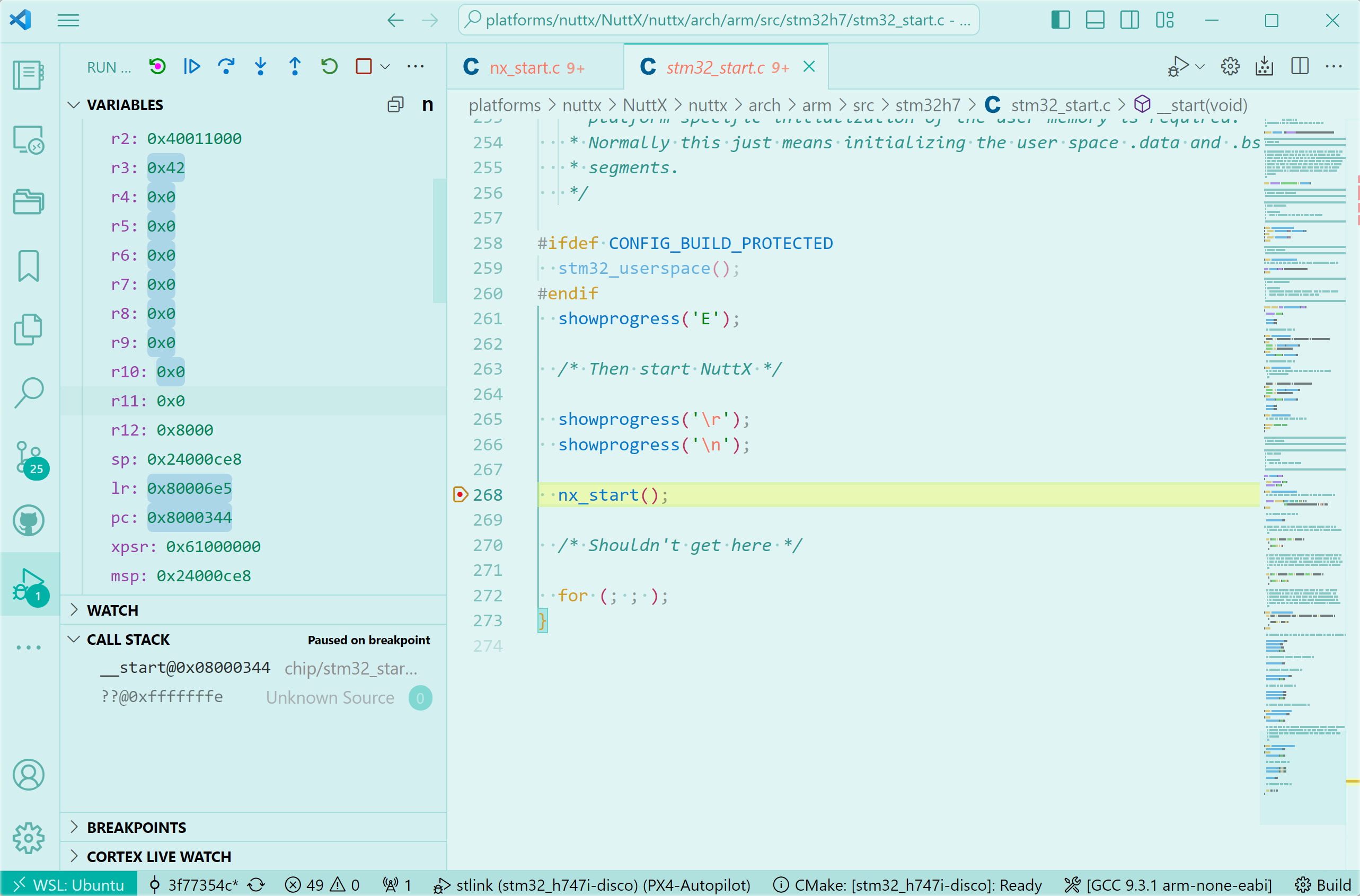
Figure 3: VS Code debugger
Conclusions
The PX4 firmware configures itself using a deeply-nested chain of symbolically-linked CMake, Make sub-projects and shell scripts which manifest at the compiler stages as a complicated graph of interdependent pre-processor manifest constants that enable or disable component-level features. It works by building a set of NuttX operating-system static libraries and then linking them against the board-level compiled objects. This approach works well when no compile-time issues exist but is difficult to debug when errors arise—as inevitably they do when porting to new platforms.
It takes some time and effort to navigate PX4. It comprises a number of sophisticated interconnected layers: the NuttX operating system, µHAL, board support layer, PX4 drivers, modules, and applications. This is to be expected for such a feature-rich and capable body of software. Starting a project from a clean working slate allows for an uncluttered approach.
Missing
math.handfabsffor example.↩︎ARM publish the patched 9-series as 9-2020-q2-update corresponding to \(9.3.1\). Install it by downloading the tarball and unzipping it then applying
sudo tar -C /opt -xjfto the tarball. Append the installation’sbindirectory to the search path.↩︎-Werror=sign-compare↩︎